位移的激光干涉测量
一、实验目的:
1. 了解激光干涉测量的原理
2. 掌握微米及亚微米量级位移量的激光干涉测量方法
3. 了解激光干涉测量方法的优点和应用场合
二、实验原理
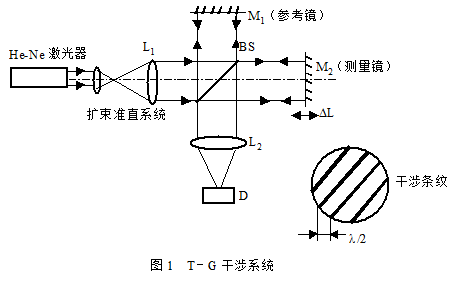
本实验采用泰曼-格林(Twyman-Green)干涉系统,T-G干涉系统是著名的迈克尔逊白光干涉仪的简化。用激光为光源,可获得清晰、明亮的干涉条纹,其原理如图1所示。
激光通过扩束准直系统L1提供入射的平面波(平行光束)。设光轴方向为Z轴,则此平面波可用下式表示:

(1)
式中A¾¾平面波的振幅,

为波数,l¾¾激光波长
此平面波经半反射镜BS分为二束,一束经参考镜M1,反射后成为参考光束,其复振幅UR用下式表示
(2)
式中AR¾¾参考光束的振幅,fR(zR)¾¾参考光束的位相,它由参考光程zR决定。
另一束为透射光,经测量镜M2反射,其复振幅Ut,用下式表示:

(3)
式中At ¾¾测量光束的振幅,ft(zt)¾¾测量光束的位相,它由测量光程Zt决定。
此二束光在BS上相遇,由于激光的相干性,因而产生干涉条纹。干涉条纹的光强I(x,y)由下式决定
(4)
式中

,而U*,UR*,Ut*为U,UR,Ut的共轭波。
当反射镜M1与M2彼此间有一交角2q,并将式(2),式(3)代入式(4),且当q较小,即sinq@q时,经简化可求得干涉条纹的光强为:

(5)
式中I0¾¾激光光强,

¾¾光程差,

。
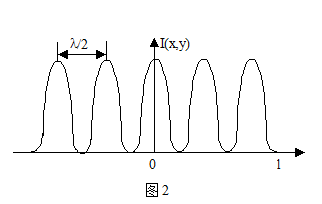
式(5)说明干涉条纹由光程差l及q来调制。当q为一常数时,干涉条纹的光强如图2所示。当测量在空气中进行,且干涉臂光程不大,略去大气的影响,则

(6)
式中N¾¾干涉条纹数
因此,记录干涉条纹移动数,已知激光波长,由式(6)即可测量反射镜的位移量,或反射镜的轴向变动量DL。干涉条纹的计数,从图1中知道,定位在BS面上或无穷远上的干涉条纹由成像物镜L2将条纹成在探测器上,实现计数。
测量灵敏为:当N=1,则
(He-Ne激光),则

如果细分N,一般以1/10细分为例,则干涉测量的灵敏度为

三、实验光路
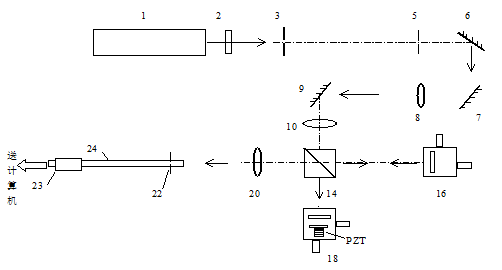
图3 实验光路图
激光器1发出的激光经衰减器2(用于调节激光强度)后由二个定向小孔3,5引导,经反射镜6,7进入扩束准直物镜8,10(即图1中的L1),由分光镜14(即图1中BS)分成二束光,分别由反射镜16(即图1中的M1),18(M2)反射形成干涉条纹并经成像物镜20(即图1中L2)将条纹成于CMOS 23上(即D),这样在计算机屏上就可看到干涉条纹,实现微位移的测量。
四、实验步骤
1. 开机,激光器1迅速起辉,待光强稳定;
2. 打开驱动电源开关;
3. 检查CMOS23上电信号灯亮否;
4. 扩束(调整光路时若移开反射镜4,13,扩束激光;移入反射镜4,13,不扩束激光);
5. 在组合工作台16,18上分别装平面反射镜,调节工作台16,18上调平调向测微器,使二路反射光较好重合(在成像物镜20后焦面上,两反射光会聚的焦斑重合);
6. 打开计算机,然后微调工作台上测微器,在显示屏上看见干涉条纹;
7. 调整CMOS在轨道上的位置,使干涉条纹清晰,锁定23,再调节可调光阑22孔径位置,滤除分光镜寄生干涉光;
8. 测量程序操作参见软件操作说明书
五、实验记录(其中

)
表1 实验数据记录表
|
序号 |
驱动位移量(L) |
条纹数(N) |
 测量位移量(L) 测量位移量(L) |
备注 |
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
4 |
|
|
|
|
六、思考题
1. 干涉测量的优点是什么?写出几个你了解的应用场合。
2. 干涉测量采用激光有什么优点?
3. 干涉条纹的间隔大小对测量有什么影响?应如何取值?
附:实验干涉条纹图
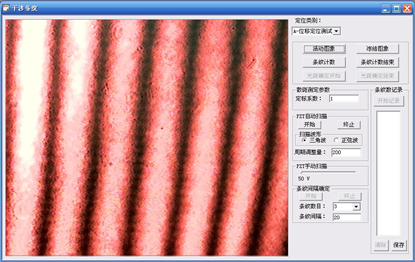
图4 干涉条纹图示例

 微信扫一扫
微信扫一扫